步進(jìn)電機(jī)都用在什么上(步進(jìn)電機(jī)使用注意事項(xiàng))
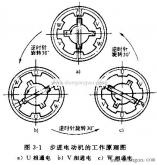
通常,步進(jìn)電動機(jī)的轉(zhuǎn)子是永磁體,并且當(dāng)電流流過定子繞組時,定子繞組會產(chǎn)生矢量磁場。磁場使轉(zhuǎn)子旋轉(zhuǎn)一個角度,以使轉(zhuǎn)子的一對磁場方向與定子的磁場...

通常,步進(jìn)電動機(jī)的轉(zhuǎn)子是永磁體,并且當(dāng)電流流過定子繞組時,定子繞組會產(chǎn)生矢量磁場。磁場使轉(zhuǎn)子旋轉(zhuǎn)一個角度,以使轉(zhuǎn)子的一對磁場方向與定子的磁場...

步進(jìn)電機(jī)可視為多極同步電機(jī)。同步電動機(jī)的定子產(chǎn)生的磁場吸引轉(zhuǎn)子的磁極,使得轉(zhuǎn)子的磁場和定子的磁場同時旋轉(zhuǎn)。當(dāng)施加負(fù)載時,轉(zhuǎn)子磁場和定子磁場保...
我不擅長步進(jìn)電機(jī),但是我仍然想簡單地談一談我的觀點(diǎn)。電機(jī)有兩種:伺服電機(jī)和步進(jìn)電機(jī)。市場更多地集中在伺服電動機(jī)上,但是價(jià)格相對較高。根據(jù)精度...
步進(jìn)電動機(jī)旋轉(zhuǎn)時,電動機(jī)各相繞組的電感會產(chǎn)生反電動勢。脈沖頻率越高,反電動勢越大。由于反電動勢的作用,電動機(jī)的相電流隨著脈沖頻率(或速度)的...

典型的三相電動機(jī)使用接觸器控制直接啟動。使用PLC控制電機(jī)并獲得反饋信號! 如果是我上面所說的,您可以繼續(xù)閱讀。哈哈,感覺就像一個測試題! ...

原始標(biāo)題:臺兆智能控制:伺服電動機(jī)與步進(jìn)電動機(jī)之間的性能差異,是一種開環(huán)控制系統(tǒng)軟件。伺服電動機(jī)實(shí)際上與現(xiàn)代數(shù)據(jù)控制系統(tǒng)有關(guān)。在現(xiàn)階段,在中...
三種常用的控制步進(jìn)電動機(jī)上下頻率的方法:(1)直線升降頻。該方法在上升和下降過程中使用恒定的加速度,因此它具有良好的穩(wěn)定性,適用于速度變化較...
如何實(shí)現(xiàn)步進(jìn)電機(jī)的正反轉(zhuǎn)?步進(jìn)電機(jī)的方向信號方向電平信號DIR用于控制步進(jìn)電機(jī)的旋轉(zhuǎn)方向。當(dāng)該端高時,電動機(jī)沿一個方向旋轉(zhuǎn),當(dāng)該端低時,電動...
1.單相通電的力矩特性(靜態(tài)力矩角特性)如果步進(jìn)電機(jī)不改變通電狀態(tài),則轉(zhuǎn)子不移動,并且在電機(jī)軸上施加了負(fù)載轉(zhuǎn)矩,從而形成了轉(zhuǎn)子。此時,轉(zhuǎn)子接...
1. 步進(jìn)電動機(jī)定義:步進(jìn)電動機(jī),也稱為電脈沖電動機(jī),是一種將電脈沖信號轉(zhuǎn)換為相應(yīng)的角位移或線性位移的電磁設(shè)備。 2、特點(diǎn):速度可以在很寬的...
在回答這個問題之前,首先讓我們了解一下步進(jìn)電動機(jī)和齒輪電動機(jī)。 步進(jìn)電動機(jī)是一種開環(huán)控制元件步進(jìn)電動機(jī),可將電脈沖信號轉(zhuǎn)換為角位移或線性位移...

如果將兩者進(jìn)行比較,則可以在六個方面進(jìn)行比較,例如響應(yīng)速度,控制精度,過載功能和低頻特性,范圍頻率特性和執(zhí)行性能。 伺服電機(jī) 步進(jìn)電機(jī)步進(jìn)...
步進(jìn)電機(jī)的轉(zhuǎn)子具有均勻分布的小齒,定子齒具有三個勵磁繞組電阻,并且?guī)缀屋S在轉(zhuǎn)子齒軸上交替交錯。 0、1/3 2、2/3((兩個相鄰轉(zhuǎn)子的齒軸...

為了評估步進(jìn)電機(jī)的特性,必須具有必要的測量方法,從本節(jié)開始,我們將首先描述步進(jìn)電機(jī)的靜態(tài)轉(zhuǎn)矩特性和步進(jìn)角精度。 靜態(tài)轉(zhuǎn)矩特性 靜態(tài)轉(zhuǎn)矩特...
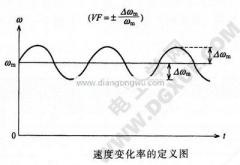
步進(jìn)電機(jī)的使用大致分為位置控制和速度控制。速度控制的速度范圍可用于低速至高速變速控制或恒速,但是變速存在問題。下圖顯示了速度變化率的定義。 ...

步進(jìn)電機(jī)的結(jié)構(gòu)主要由圖片說明。步進(jìn)電動機(jī)的結(jié)構(gòu)大致分為兩部分:定子和轉(zhuǎn)子。轉(zhuǎn)子由三部分組成:轉(zhuǎn)子1,轉(zhuǎn)子2和永磁鋼。并且轉(zhuǎn)子被軸向磁化,使得...
步進(jìn)電機(jī)是一種機(jī)電組件,可將電脈沖信號轉(zhuǎn)換為角位移或線性位移。步進(jìn)電機(jī)的輸入是一系列脈沖,輸出是相應(yīng)的增量位移或步進(jìn)運(yùn)動。在正常操作中,它每...
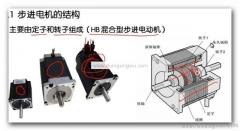
今天,我要介紹一種步進(jìn)電機(jī),其結(jié)構(gòu)和工作原理在電氣行業(yè)中很常見。 1.步進(jìn)電機(jī)主要由定子和轉(zhuǎn)子組成(HB混合式步進(jìn)電機(jī)),請參考下圖,如圖1...
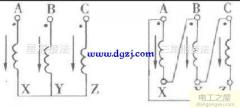
三相電動機(jī)的功率會從三角形連接變?yōu)樾切芜B接嗎? 當(dāng)三角形連接更改為星形連接時,電源肯定會改變。首先,線電壓等于三角形連接時的相電壓,線電流是...

星形連接和三相連接的區(qū)別在于,在380V電源中,線電壓是相電壓的三倍,線電流等于相電流。在三角形連接中,電機(jī)相電壓等于線電壓,線電流等于根部...