
步進電機(步進電機的構造(以5相步進為例))
發布日期:2021-03-10 18:00 作品聲明:內容由AI生成
步進電機的結構主要由圖片說明。步進電動機的結構大致分為兩部分:定子和轉子。轉子由三部分組成:轉子1,轉子2和永磁鋼。并且轉子被軸向磁化,使得如果轉子1為N極,則轉子2為S極。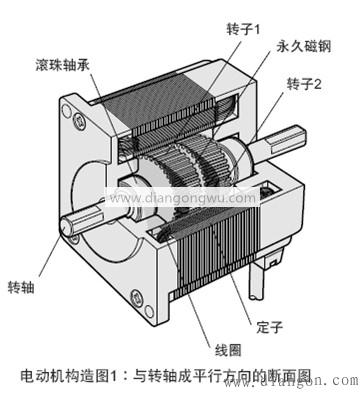 定子有10個小的鋸齒狀磁極,全部為線圈狀。線圈對角線位置的磁極相互連接,電流流過后,線圈便以相同極性磁化。 (例如,當特定的線圈流過電流時,對角線上的極會同化為S極或N極。)對角線上的兩個極形成一個相,因此由于存在五個相A,所以要經過五個相到E稱為電動機。
定子有10個小的鋸齒狀磁極,全部為線圈狀。線圈對角線位置的磁極相互連接,電流流過后,線圈便以相同極性磁化。 (例如,當特定的線圈流過電流時,對角線上的極會同化為S極或N極。)對角線上的兩個極形成一個相,因此由于存在五個相A,所以要經過五個相到E稱為電動機。 系統圖
系統圖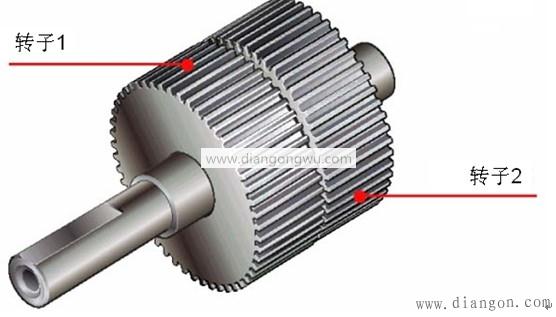 轉子的外圈由50個小齒組成,轉子1和轉子2的小齒在結構上以1/2節距錯開。結果,轉子具有100個小齒。當前,高分辨率類型的轉子具有一個加工了100個齒的轉子,因此高分辨率類型的轉子具有200個小齒。因此,可以以機械方式實現一般步進電動機半步的分辨率(一般步進電動機半步需要細分電氣來實現)。
轉子的外圈由50個小齒組成,轉子1和轉子2的小齒在結構上以1/2節距錯開。結果,轉子具有100個小齒。當前,高分辨率類型的轉子具有一個加工了100個齒的轉子,因此高分辨率類型的轉子具有200個小齒。因此,可以以機械方式實現一般步進電動機半步的分辨率(一般步進電動機半步需要細分電氣來實現)。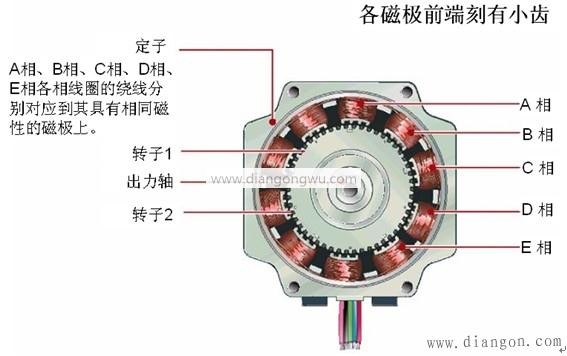 電機結構圖2:垂直于軸的橫截面
電機結構圖2:垂直于軸的橫截面
新聞資訊NEWS
產品中心PRODUCTS
相關內容