
步進電機(步進電機速度變化的測量方法圖解)
發布日期:2021-03-10 18:00 作品聲明:內容由AI生成
步進電機的使用大致分為位置控制和速度控制。速度控制的速度范圍可用于低速至高速變速控制或恒速,但是變速存在問題。下圖顯示了速度變化率的定義。
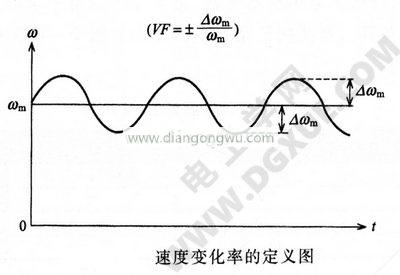
現在,步進電機的平均速度表示為ωm,并且速度從零變為最大值。例如,通過以下等式定義旋轉△ωm時的速度VF的變化率。
這是速度變化率的度量,根據實際負載慣量以等效慣量或摩擦轉矩進行測量,并且接近所使用的實際值。特別是在慣性較大時,速度變化率(也稱為速度故障或抖動,擺動等)也較大。因此,需要注意步進電機的速度工作范圍,速度越快,速度變化率越小。
這些測量方法主要分為編碼器方法和激光測量方法。使用編碼器時,編碼器的軸心和步進電機的聯軸器必須同心,并且還必須考慮編碼器慣性的影響。要計算速度變化率,請首先計算每個編碼器單位時間的脈沖數,然后計算速度變化率。作為將激光盤安裝在步進電動機上的設備的激光測量方法在市場上可買到,并且該盤反射激光束,將光反射回去,并利用多普勒效應來計算速度變化。如果對使用編碼器進行測量沒有特殊要求,則最好使用激光計。
新聞資訊NEWS
產品中心PRODUCTS
相關內容