
步進電機都用在什么上(PM型永磁步進電機轉矩的產生及負載角)
發布日期:2021-03-11 15:00 作品聲明:內容由AI生成
步進電機可視為多極同步電機。同步電動機的定子產生的磁場吸引轉子的磁極,使得轉子的磁場和定子的磁場同時旋轉。當施加負載時,轉子磁場和定子磁場保持恒定的角度偏差,從而在轉子中產生平衡負載的電磁轉矩,該偏差角稱為功率角。
如下圖所示,定子在氣隙外部,轉子在氣隙內部,并且定子和轉子都是永磁體。外定子以代表旋轉磁場的鐵心速度逆時針旋轉。此時,當施加負載轉矩TL時,僅轉子極軸以功率角中心δ偏離定子極軸,并且轉子仍在定子磁場下以同步速度n0旋轉。

因為由轉子產生的輸出轉矩T1與負載角成正弦關系變化,所以最大轉矩為Tm1,其等式如下。
T1=Tm1sinδ
因此,負載扭矩TL與δ平衡。在下圖中,垂直軸表示轉矩T1,水平軸表示負載角,當δ=π/2位移角時,會出現最大電磁轉矩。當負載轉矩大于最大電磁轉矩δ>π/2時,定子磁場無法使轉子以同步速度旋轉,這種現象稱為失步現象。真正的步進電機的定子不是如上圖所示旋轉的永磁體。所謂的兩相電動機是指兩個線圈,它們之間的間距差為π/2。通過具有相位差的交流電后,會產生一個π/2的旋轉磁場。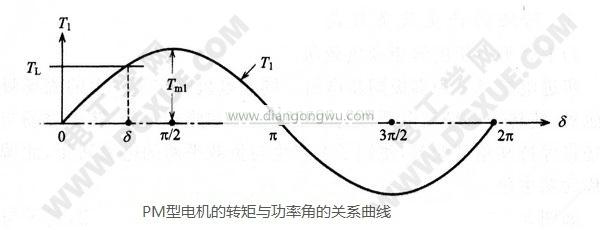
新聞資訊NEWS
產品中心PRODUCTS
相關內容