步進(jìn)電機(jī)(步進(jìn)電機(jī)速度變化的測(cè)量方法圖解)
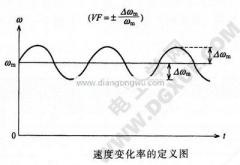
步進(jìn)電機(jī)的使用大致分為位置控制和速度控制。速度控制的速度范圍可用于低速至高速變速控制或恒速,但是變速存在問(wèn)題。下圖顯示了速度變化率的定義。 ...

步進(jìn)電機(jī)的使用大致分為位置控制和速度控制。速度控制的速度范圍可用于低速至高速變速控制或恒速,但是變速存在問(wèn)題。下圖顯示了速度變化率的定義。 ...
步進(jìn)電機(jī)是一種機(jī)電組件,可將電脈沖信號(hào)轉(zhuǎn)換為角位移或線性位移。步進(jìn)電機(jī)的輸入是一系列脈沖,輸出是相應(yīng)的增量位移或步進(jìn)運(yùn)動(dòng)。在正常操作中,它每...
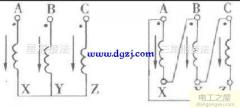
三相電動(dòng)機(jī)的功率會(huì)從三角形連接變?yōu)樾切芜B接嗎? 當(dāng)三角形連接更改為星形連接時(shí),電源肯定會(huì)改變。首先,線電壓等于三角形連接時(shí)的相電壓,線電流是...
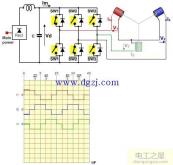
無(wú)刷直流電動(dòng)機(jī)的工作原理圖,繞組為三相星形連接,120度均勻分布,采用三相半橋驅(qū)動(dòng)方式,轉(zhuǎn)子為一對(duì)磁極。在圖中所示的位置,磁體的磁極中心線與...
伺服系統(tǒng)是CNC機(jī)床的重要組成部分,CNC機(jī)床的精度和速度指示器通常由伺服系統(tǒng)確定。伺服系統(tǒng)經(jīng)歷了從步進(jìn)伺服到直流伺服再到交流伺服的發(fā)展過(guò)程...

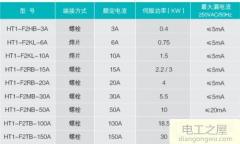
我的經(jīng)驗(yàn)是取出轉(zhuǎn)子,查看定子導(dǎo)線孔的總數(shù)和線圈塌陷的程度。例如,36個(gè)托架的制動(dòng)距離為18?jìng)€(gè)托架,旋轉(zhuǎn)速度通常為2800rpm,碎裂為9個(gè)插...

在狗環(huán)控制伺服系統(tǒng)中,由于沒(méi)有位置檢測(cè)和反饋裝置,因此機(jī)械系統(tǒng)必須能夠隨時(shí)嚴(yán)格跟蹤步進(jìn)電機(jī)的運(yùn)動(dòng),以確保達(dá)到工作精度要求。并且在任何情況下。...
特定的主驅(qū)動(dòng)電機(jī)(型號(hào)Y100L2-4.3kW)使用日本松下電氣變頻器(型號(hào)BFV7037FP)。安裝并測(cè)試機(jī)器后,電動(dòng)機(jī)無(wú)法正常工作。 按...

電機(jī)質(zhì)量測(cè)量方法和故障原理分析要確定它是好是壞,請(qǐng)使用萬(wàn)用表測(cè)量電動(dòng)機(jī)中的每根電線。兩條線都必須具有電阻。否則會(huì)損壞電機(jī)。如果兩根引線的電阻...

增量編碼器將位移轉(zhuǎn)換為周期性的電信號(hào),然后將電信號(hào)轉(zhuǎn)換為計(jì)數(shù)脈沖,脈沖數(shù)表示位移的大小。編碼器是一種將角位移或線性位移轉(zhuǎn)換為電信號(hào)的設(shè)備。根...

Delta伺服驅(qū)動(dòng)器的“空載點(diǎn)動(dòng)測(cè)試”用于使用點(diǎn)動(dòng)模式測(cè)試伺服驅(qū)動(dòng)器和電機(jī)。此時(shí),無(wú)需連接信號(hào)控制線即可連接電源線和編碼器線。它僅在驅(qū)動(dòng)器面...
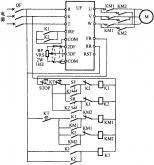
某些變頻器不具有正向和反向旋轉(zhuǎn)功能,只能沿一個(gè)方向旋轉(zhuǎn)電動(dòng)機(jī)。此時(shí),可以使用圖4-12所示的電路來(lái)實(shí)現(xiàn)可逆操作。馬達(dá)。 圖4-12不具有正...

幾個(gè)汽缸拉動(dòng)的跡象: 1.廢氣排放藍(lán)煙或黑煙。 當(dāng)發(fā)動(dòng)機(jī)拉動(dòng)氣缸時(shí),活塞與氣缸壁之間的間隙增大,因此曲軸箱中的機(jī)油進(jìn)入氣缸并參與燃燒,此時(shí)廢...
電動(dòng)機(jī)電容器的作用是什么? 220v電動(dòng)機(jī)啟動(dòng)電容器的作用單相交流電動(dòng)機(jī)的電容將改變用于啟動(dòng)電動(dòng)機(jī)的電動(dòng)機(jī)的起動(dòng)繞組和驅(qū)動(dòng)繞組之間的相角。 ...

僅具有由單相交流電源驅(qū)動(dòng)的單相定子繞組的異步電動(dòng)機(jī)稱為單相異步電動(dòng)機(jī)或單相感應(yīng)電動(dòng)機(jī)。 單相異步電動(dòng)機(jī)可以由220V交流電源直接供電。其結(jié)構(gòu)...
“精度”用于描述反映測(cè)量值和實(shí)際值之間的誤差的物理量的精度,而“分辨率”用于描述反映讀取過(guò)程的刻度的劃分。這是可以讀取的最小可變值。簡(jiǎn)單類推...
1.如何選擇伺服驅(qū)動(dòng)器的前端濾波器? 為了減少變頻器或伺服驅(qū)動(dòng)器中的電網(wǎng)干擾,主要介紹了許多制造商的伺服驅(qū)動(dòng)器和變頻器的濾波器。當(dāng)然,這是您...
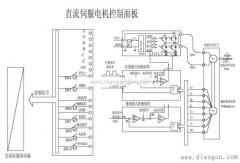
DC伺服類似于AC伺服,可以采用控制器開(kāi)環(huán)控制方式,控制器半閉環(huán)控制和全閉環(huán)控制系統(tǒng)。 DC伺服系統(tǒng)控制面板的結(jié)構(gòu)如下。面板的右側(cè)是與直流...
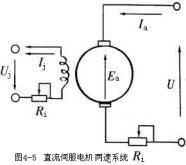
DC伺服電機(jī)的基本原理與普通DC電機(jī)的基本原理相同。如圖1所示,電動(dòng)機(jī)轉(zhuǎn)子的載流導(dǎo)體(例如電樞繞組)會(huì)受到電磁的影響。定子磁場(chǎng)的轉(zhuǎn)矩M使電動(dòng)...
伺服電動(dòng)機(jī)控制方法_伺服電動(dòng)機(jī)控制方法如果您對(duì)電動(dòng)機(jī)的速度和位置沒(méi)有要求,請(qǐng)輸出恒定轉(zhuǎn)矩并使用轉(zhuǎn)矩模式。 如果您對(duì)位置和速度有特定的精度要求...