無刷直流電機運行原理圖(直流無刷電機繞組圖解)
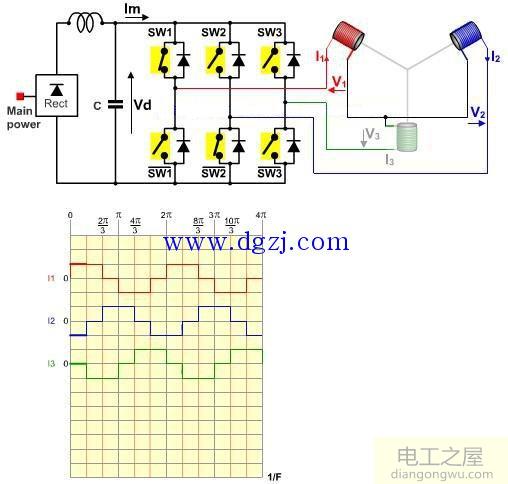
無刷直流電動機的工作原理圖,繞組為三相星形連接,120度均勻分布,采用三相半橋驅動方式,轉子為一對磁極。在圖中所示的位置,磁體的磁極中心線與A相繞組對齊,這時,控制電路根據轉子位置檢測信號觸發S1開關管導通,并向A1繞組供電。 B相繞組。在B相繞組的磁場的作用下,轉子順時針旋轉120個單扇門,并到達虛線轉子指示的位置。磁鐵的磁極中心線與相位對齊。此時,控制電路根據轉子位置檢測信號使S1開關管截止,并使S3開關管截止。接通電源,A相繞組通電,轉子順時針旋轉120度。在A相繞組磁場的作用下,轉子按照上述通電順序周期性地導通,并且轉子順時針旋轉。無刷直流電動機收集轉子位置信號。前者具有簡單的電動機結構,但是難以起動電動機,而后者具有稍微復雜的電動機結構,但是起動穩定且可靠。當前,大多數無刷直流電動機都使用后者。位置傳感器有幾種類型,用于空調的無刷直流電動機通常使用霍爾元件作為位置傳感器。
電動機的定子繞組主要由三相對稱星形連接制成,這與三相異步電動機非常相似。磁化的永磁體膠粘到電動機的轉子上,并且位置傳感器安裝在電動機上以檢測電動機轉子的極性。驅動器由電力電子設備和集成電路組成,具有通過接收電動機的啟動,停止和制動信號來控制電動機的啟動,停止和制動,以及接收位置傳感器信號和正向信號的功能。信號。當打開和關閉反向信號可變電橋的每個功率管以控制反向信號時,它會產生連續扭矩,接收速度指令和速度反饋信號來控制和調節速度,并提供保護和指示燈。由于無刷直流電動機以自控模式運行,因此它們不會像同步電動機那樣在轉子上增加啟動繞組,而同步電動機會在重載下以變頻調速方式啟動,并且在負載下不會振蕩并不會失步。它突然改變。
霍爾信號傳遞到控制器,控制器通過電動機相線(粗線,而不是霍爾線)為電動機線圈供電。將線圈纏繞在定子上。螺紋通常安裝在定子上并旋轉。孔驅動一個新的位置信號。控制器的粗線改變了流向電動機線圈的電流方向。電機繼續運轉。要旋轉(如果線圈和磁鐵的位置發生變化,則線圈必須相應地改變電流方向,以便電動機可以繼續沿一個方向移動。否則,電動機將在某個位置左右擺動而不是繼續旋轉)。旋轉)這是電子換向。
如圖所示