
伺服系統的組成包括哪些部分(直流伺服系統的組成和控制原理)
DC伺服類似于AC伺服,可以采用控制器開環控制方式,控制器半閉環控制和全閉環控制系統。
DC伺服系統控制面板的結構如下。面板的右側是與直流伺服電機接口板的接口,包括電機驅動器接口和編碼器接口。界面左側。運動控制器面板包括位置控制模式界面和速度控制模式界面。
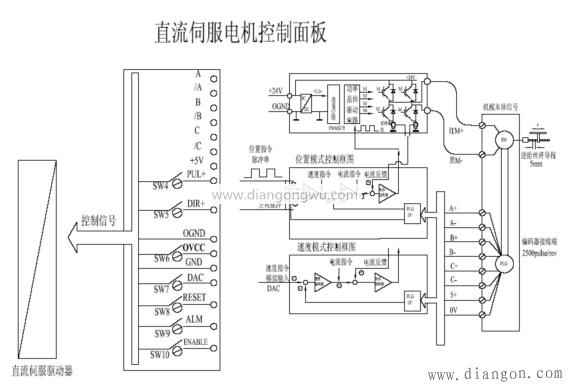
M +,M-信號是用于驅動電動機運動的直流無刷伺服電動機的電源線。
A +,A-,B +,B-,C +,C-,5 +,0V信號是用于反饋電機軸實際位置的編碼器信號。
A,/A,B,/B,C,/C,+ 5V,PUL +,DIR +,OGND,OVCC,GND,DAC,RESET,ALM,ENABLE是連接到控制器的控制信號。
表示:
A,/A,B,/B,C,/C是驅動器反饋給運動控制器的編碼器信號。
+ 5V是電源。
PUL +,PUL-是在位置模式下用于電機控制的脈沖信號。
DIR +,DIR-是在位置模式下用于電機控制的方向信號。
OGND,OVCC和GND分別是模擬地,模擬電源和數字地。
DAC是驅動器接收的模擬控制信號,范圍通常為-10V-10V。
RESET,ALM和ENABLE是分別表示逆變器的復位,警報和激活功能的控制信號。
直流伺服驅動器通常具有速度控制模式和位置控制模式。
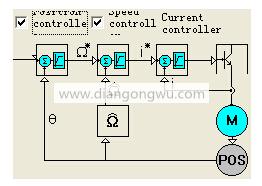
采用位置模式時,輸入控制信號為脈沖和方向(或正負脈沖),采用速度模式時,輸入控制信號為模擬正信號。驅動器通過速度控制器將輸入信號轉換為速度控制信號,并將其轉換為電流控制信號。電流信號通過PWM環路施加到功率放大器模塊的輸出模塊,最后施加到電動機。
DC伺服驅動器采用IDM,只能用作伺服驅動器。
IDM240/640是嵌入式智能高精度全數字伺服驅動器,可以驅動方波或正弦波無刷伺服電機(PMSM),直流伺服電機,并可以配置多個分布式智能網絡運動系統。具有多達256個軸的嵌入式高級可編程運動語言(TML)提供了各種高級運動控制和PLC特殊功能。
主要功能如下。
分布式智能,單軸主控制操作或從軸模式
控制模式:位置,速度,轉矩,電壓,外部變量
運動模式:脈沖+方向,電子齒輪,輪廓,輪廓
可編程保護:位置故障,過流,過壓或欠壓,I2t,
DSP控制技術:基于MotionChipTM技術
RS232/485串行接口,波特率可以達到115KB。
CAN2.0本地總線,與CANopen兼容,波特率高達1MHz
輸出電流:連續電流5A/8A,峰值電流16A,
電源電壓:12-48VDC(IDM240),12-48VDC(邏輯電源)/80V(電動機)(IDM640)
緊湊的結構設計:136 x 84.5 x 26mm
控制軟件采用Easy Motion Studio,控制軟件的特征如下。
EasyMotion Studio平臺是一種先進的圖形評估和分析編程工具,可讓您快速設置電動機和驅動器參數以及運動程序程序。 TML_LIB功能庫是用于智能伺服驅動器以運行運動控制應用程序的功能庫。調用Delphi開發的應用程序庫中的.DLL文件,C/C ++中的Labview,基本端口狀態等后,與驅動程序直接通信,參數設置,狀態查詢,發送命令,運動事件定義,測試輸入和輸出。
IDM640入門套件:包含驅動器的完整組件,包括IDM640驅動器,電機,I/O板,EasyMotion Studio軟件,應用程序幫助和完整文件。它是測試運動控制程序的理想實驗平臺。以上所有內容都包含在準備運行的即插即用組件中。

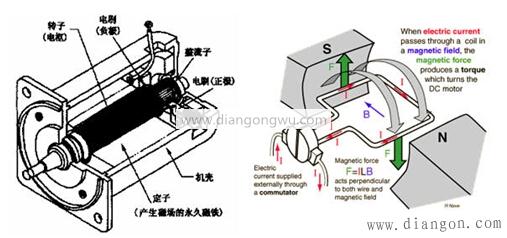
DC伺服電機包括以下組件。
定子:磁場永久磁鐵
轉子:電樞繞組
換向:換向器和碳刷
施加到直流電動機上的直流電通過借助換向器和電刷使流過直流電動機電樞線圈的電流方向發生變化,從而改變了電樞產生的電磁轉矩的方向。它不會更改直流電動機以使其沿特定方向旋轉。
DC Servo :的優勢
?精確的速度控制
?轉矩速度特性非常困難
?原理簡單易用。
?價格優勢
缺點:
?電刷換向
?速度限制
?額外阻力
?產生磨損顆粒(用于潔凈室)