歡迎光臨奕步銷售華力電機(jī)集團(tuán)有限公司內(nèi)電機(jī)的官網(wǎng)銷售辦事處,銷售電話全天候服務(wù),價(jià)格合理公道,滿足您的需求!

臺達(dá)伺服驅(qū)動(dòng)器jog模式(臺達(dá)伺服器進(jìn)jog模式的方法)
發(fā)布日期:2021-03-09 18:00 作品聲明:內(nèi)容由AI生成
Delta伺服驅(qū)動(dòng)器的“空載點(diǎn)動(dòng)測試”用于使用點(diǎn)動(dòng)模式測試伺服驅(qū)動(dòng)器和電機(jī)。此時(shí),無需連接信號控制線即可連接電源線和編碼器線。它僅在驅(qū)動(dòng)器面板上起作用。點(diǎn)動(dòng)模式的速度為r/min,不包括脈沖頻率。為了安全起見,我們通常將速度設(shè)置為較低的速度。輸入點(diǎn)動(dòng)的步驟如下。
1:使用軟件將伺服啟動(dòng)和參數(shù)P2-30輔助功能設(shè)置為1。此設(shè)置是軟件強(qiáng)制伺服啟動(dòng)。
2:將參數(shù)P4-05設(shè)置為微動(dòng)速度(單位:r/min),設(shè)置所需的微動(dòng)速度,然后按SET鍵使驅(qū)動(dòng)器進(jìn)入JOG模式。
3:按模式鍵退出JOG模式。
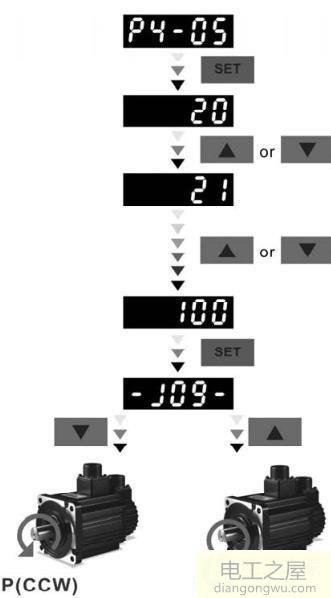
按下面板上的上部按鈕時(shí),伺服電機(jī)沿CCW方向旋轉(zhuǎn),即表示反向旋轉(zhuǎn);按下面板上的下部按鈕時(shí),伺服電機(jī)沿CW方向旋轉(zhuǎn),即表示正向旋轉(zhuǎn)。釋放按鈕以停止運(yùn)行。
嘗試在點(diǎn)動(dòng)模式下空載測試機(jī)器。如果參數(shù)設(shè)置正確,則很容易從面板上進(jìn)行操作。以上是臺達(dá)ASDA-B2系列服務(wù)器的示例。對于特定型號,請參閱說明手冊
新聞資訊NEWS
產(chǎn)品中心PRODUCTS
相關(guān)內(nèi)容