
什么叫步進電機(反應式步進電動機的工作原理)
步進電動機的輸入功率是脈沖電壓,有一個輸入脈沖,電動機以一定角度旋轉。這是一種“逐步”旋轉的電動機,因其旋轉角度與輸入電脈沖數嚴格成正比而得名。通過改變輸入脈沖的頻率,可以廣泛,平穩,連續地調節輸出速度。它也是唯一能夠執行開環控制的執行電器,廣泛用于簡單和經濟的數控裝置的修改和設計中。
與步進電動機有關的術語:
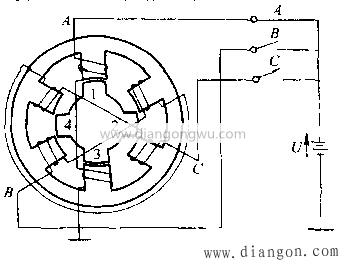
常數:電動機定子具有極數,極對數是相數。有六個極,它們是三相步進電動機,如圖1所示。 5相步進電動機有10極。
位數:每次電動機定子繞組改變傳導模式時,這稱為位數。
步距角:轉子旋轉一位的空間角,用符號a表示。
齒距角:這是轉子在空間中的齒距角。例如,轉子具有N個齒,槳距角=360°/N。
步進電機由定子和轉子組成。定子和轉子磁極上有齒。定子極的磁寬度和磁槽應與磁槽的磁寬度和磁槽相同。轉子。
公式中的m相數
k-1、2、3,正整數。
例如,對于三相步進電動機,轉子齒數為40,上式為z=2m(k±1/m),k為7并建立了方程。轉子齒數為40個,可以滿足錯齒的要求,說明步進電機的結構是合理的。
步進電動機的步進角α由下式確定。 a=360°/mzc
其中z轉子齒數
m常數
c因子,c=1或2。因子c與步進電動機的通電模式有關。當連接到兩個相鄰位的定子的極數相同時,c=1,當它們的極性不同時,c=2.360°/mz是定子相對于轉子的交錯螺距角。
步進電機的速度n(r/min)與通電頻率f成正比。即
n=60a°/360°=60f/mzc(r/min)
當步進電機以傳動比i(i=z1/z2)和驅動螺桿螺距t通過傳動系統時,脈沖當量δ(mm/pulse)為: δ=tai/360°=ti/mzc
步進電動機的相位和齒數越多,步進角越小,等效脈沖越小。可以提高加工精度,但是電源也很復雜。目前,相對較小的步距角通常為0.75°,脈沖當量通常為0.01mm。常用步驟數為3或5步,最多6步。
步進電動機有單拍、雙拍、單雙拍幾種不同的通電方式,以三相步進電動機為例:
(1)三相單相3位功率模式:一次只給一個相通電,然后按A→B→C→A的順序重新通電。由于一次只能給一個相通電,因此在繞組接通時電機會失去自鎖轉矩,并且其穩定性很差。步距角系數c=1。
(2)三相雙三拍通電方式:兩相按AB→BC→CA→AB的順序周期性地同時通電。由于每次都通電兩級,因此切換時不會損失自鎖扭矩,穩定性更好。步距角系數c=1。
(3)三相單雙三拍(六拍)通電方式:即使按A→AB→B→BC→C→CA→A的順序打開電源,穩定性也很好。由于一個齒的螺距一次為6位,因此步距角為另外兩個,即步距角因子c=2。