伺服電機原理(伺服電機基本原理、構造及特性)
伺服電機原理(伺服電機基本原理、構造及特性)
伺服電機是將脈沖電流數據信號變化為角速度或線偏移的開環控制元器件。
在非超重的狀況下,電動機的轉速比、終止的部位只在于差分信號的頻率和脈沖數,而不會受到負荷轉變的危害,即給電動機加一個差分信號,電動機則掉轉一個橫距角。
這一線性相關的存有,再加上伺服電機僅有規律性的差值而無積累差值等特性。促使在速率、部位等操縱行業用伺服電機來控制變的十分的簡易。
盡管伺服電機已被普遍地運用,但伺服電機并不可以象一般的直流無刷電機,交流電動機在基本下應用。
它務必由雙環狀差分信號、輸出功率光耦電路等構成自動控制系統即可應用。因而用好伺服電機卻非一件容易的事情,它牽涉到機械設備、電動機、電子器件及電子計算機等很多專業技能。
現階段,生產制造伺服電機的生產廠家確實許多,但具備技術專業專業技術人員,可以自主開發設計,研發的生產廠家卻很少,絕大多數的生產廠家只一、二十人,連最基礎的機器設備也沒有。
只是處在一種盲目跟風的仿造環節。這就給客戶在商品型號選擇、應用中導致很多不便。簽于上述所說情況,決策以普遍的磁感應子式伺服電機為例子,描述其基礎原理。望能對眾多客戶在型號選擇、應用、及整個機械改善時有一定的協助。
一、磁感應子式伺服電機原理
(一)反應方程伺服電機基本原理
因為反應方程伺服電機原理非常簡單。下邊先描述三相反應方程伺服電機基本原理。
1、構造:
轉子分布均勻著許多小齒,電機定子齒有三個勵磁調節器繞阻,其幾何圖形中心線先后各自與電機轉子齒中心線分開。0、1/3て、2/3て,(鄰近兩電機轉子齒中心線間的間距為齒距以て表明),即A與齒1相對性齊,B與齒2往右邊錯開1/3て,C與齒3往右邊分開2/3て,A’與齒5相對性齊,(A’便是A,齒5便是齒1)
2、轉動:
如A互通電,B,C相不插電時,因為電磁場功效,齒1與A兩端對齊,(電機轉子不會受到一切力下列均同)。如B互通電,A,C相不插電時,齒2應與B兩端對齊,這時電機轉子向偏移過1/3て,這時齒3與C偏位為1/3て,齒4與A偏位(て-1/3て)=2/3て。如C互通電,A,B相不插電,齒3應與C兩端對齊,這時電機轉子又向偏移過1/3て,這時齒4與A偏位為1/3て兩端對齊。如A互通電,B,C相不插電,齒4與A兩端對齊,電機轉子又向偏移過1/3て那樣歷經A、B、C、A各自插電情況,齒4(即齒1前一齒)挪到A相,轉子往右過一個齒距,假如不斷按A,B,C,A……插電,電動機就每一步(每單脈沖)1/3て,往右邊轉動。如按A,C,B,A……插電,電動機就翻轉。
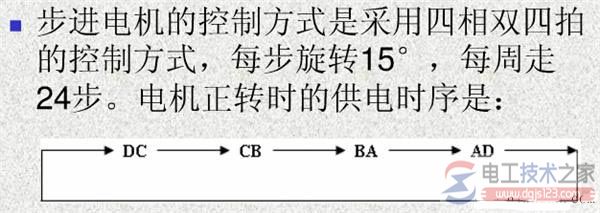
不難看出:電動機的部位和速率由導電性頻次(脈沖數)和頻率成一一對應關聯。而方位由導電性次序決策。
但是,出自于對扭矩、穩定、噪聲及降低視角等層面考慮到。通常選用A-AB-B-BC-C-CA-A這類導電性情況,那樣將原先每一步1/3て更改為1/6て。甚至是根據二相電壓不一樣的組成,使其1/3て變成1/12て,1/24て,這就是電動機細分化驅動器的基礎理論來源。
不會太難發布:電機轉子上面有m相勵磁調節器繞阻,其中心線各自與電機轉子齒中心線偏位1/m,2/m……(m-1)/m,1。而且導電性按一定的零線火線電動機就能正反轉被控制——它是伺服電機轉動的物理學標準。只需合乎這一標準大家理論上能夠 生產制造一切相的伺服電機,出自于成本費等各個方面考慮到,銷售市場上一般以二、三、四、五相為多。
3、扭矩:
電動機一旦插電,在定電機轉子間將造成電磁場(磁通量Ф)當電機轉子與電機定子分開一定視角造成力F與(dФ/dθ)正相關 S 其磁通量Ф=Br*S Br為磁密,S為吸磁總面積 F與L*D*Br正相關L為變壓器鐵芯合理長短,D為電機轉子直徑 Br=N·I/R N·I為勵磁調節器繞阻安線圈匝數(電流量乘線圈匝數)R為磁電式。
扭矩=力*半經
扭矩與電動機合理容積*安線圈匝數*磁密正相關(只考慮到線形情況)因而,電動機合理容積越大,勵磁調節器安線圈匝數越大,定電機轉子間磁密越小,電動機扭矩越大,相反也是。
(二)磁感應子式伺服電機
1、特性:
磁感應子式伺服電機與傳統式的反應方程伺服電機對比,構造上電機轉子加有永磁材料,以出示鐵磁性材料的工作中點,而電機定子勵磁電流只需出示轉變的電磁場而無須出示磁原材料工作中點的能耗,因而該電機效率高,電流量小,發燙低。因永磁材料的存有,該電動機具備極強的反電勢差,其本身阻尼作用比較好,使其在運行全過程中較為穩定、噪音低、低頻震動小。
磁感應子式伺服電機某種意義上能夠 當作是低速檔同步電動機。一個四相電動機能夠 作四相運作,還可以作二相運作。(務必選用雙極工作電壓驅動器),而反應方程電動機則不可以這般。比如:四相,八相運作(A-AB-B-BC-C-CD-D-DA-A)徹底能夠 選用二相八拍運作方法.不會太難發覺其標準為C=,D=.
一個二相電動機的內部繞阻與四相電動機完全一致,小輸出功率電動機一般立即接為二相,而輸出功率大一點的電動機,為了更好地方便快捷,靈便更改電動機的動態性特性,通常將其外界布線為八根導線(四相),那樣應用時,既能夠 作四相電動機應用,能夠 作二相電機繞組串連或串聯應用。
2、歸類
磁感應子式伺服電機以相數可分成:二相電動機、三相電機、四相電動機、五相電動機等。以電動機軸號(電動機直徑)可分成:42BYG(BYG為磁感應子式伺服電機編號)、57BYG、86BYG、110BYG、(國家標準),而像70BYG、90BYG、130BYG等均為中國
二、驅動器自動控制系統構成
應用、操縱伺服電機務必由環狀單脈沖,功率放大電路等構成的自動控制系統,其程序框圖以下:
1、差分信號的造成。
差分信號一般由單片機設計或CPU造成,一般差分信號的pwm占空比為0.3-0.4上下,電機額定功率越高,pwm占空比則越大。
2、數據信號分派
我廠生產制造的磁感應子式伺服電機以二、四相電動機為主導,二相電動機工作方式有二相四拍和二相八拍二種,實際分派以下:二相四拍為,橫距夾角1.9度;二相八拍為,橫距夾角0.9度。四相電動機工作方式也是有二種,四相四拍為AB-BC-CD-DA-AB,橫距夾角1.9度;四相八拍為AB-B-BC-C-CD-D-AB,(橫距夾角0.9度)。
3、功率放大電路
功率放大電路是驅動器系統軟件更為關鍵的一部分。伺服電機在一定轉速比下的轉距在于它的動態性均值電流量并非靜態數據電流量(而樣版上的電流量均為靜態數據電流量)。均值電流量越大電動機扭矩越大,要做到均值電流量大這就必須驅動器系統軟件盡可能擺脫電動機的反電勢差。因此不一樣的場所采用不一樣的的驅動器方法,到迄今為止,驅動器方法一般有下列幾類:恒流源、恒流源串電阻器、高壓低壓驅動器、恒流電源、細成績等。
熱門推薦:
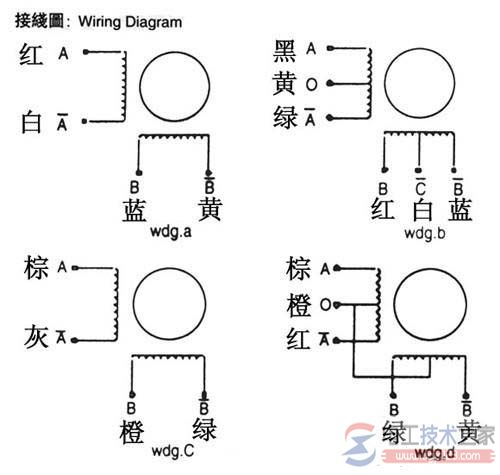
步進電機電機接線圖
共享一些伺服電機的接線方法,包含兩相步進電機電機接線圖、兩相混合式教學伺服電機控制器的接線方法、四相步進電機電機接線圖(三菱plc與伺服電機控制器的接線方法)。....
西門子PLCs7-200操縱伺服電機
西門子PLCs7-200操縱伺服電機程序編寫的編程設計案例,plc程序編寫簡易完成對電機控制系統,梯形圖由源程序啟用兩個正反轉匯編程序,匯編程序最先涉及到插口,再用次序命令循環系統合閘。....
西門子PLCS7-200操縱步進電機電機接線圖
相關西門子PLCS7-200操縱伺服電機方法與接線方法,梯形圖由源程序啟用兩個正反轉匯編程序,匯編程序最先涉及到插口,再用次序命令循環系統合閘,很感興趣的盆友參照下。....

伺服電機光耦電路圖
共享一個伺服電機光耦電路圖,流程電機驅動器電源電路的電源電路鴇,各一部分電源電路的作用表明,包含速率辨別電源電路,過電流、過熱檢驗電源電路,各相繞阻光耦電路等。....

伺服電機控制器系統軟件電路設計圖
伺服電機控制器系統軟件電路設計圖,伺服電機光耦電路的原理圖,包含單片機設計伺服電機光耦電路,伺服電機控制器系統軟件電路設計圖等,剖析了電源電路的構造構成與原理。....