
反應式步進電機(磁阻式步進電機工作原理)
發布日期:2021-03-09 16:00 作品聲明:內容由AI生成
圖1是在中國常見的三相磁阻步進電動機的剖視圖。電動機定子的每兩個相對的磁極形成一個相,并且這些磁極的繞組反向串聯以形成N-S磁極。電動機的轉子在圓周上均勻分布有40個小齒,因此俯仰角θZ=360°(1/40)=9°。
(1)單三發操作
(2)雙三拍操作
(3)單雙3相6位工作原理
(4)多段磁阻步進電機。多段磁阻步進電機根據軸長分為性能。
獨立段,每個段由一組繞組激勵以形成一個相。因此,三相電動機具有三相。電動機的每個部分都有一個固定在殼體上的定子,轉子制成一體并由電動機兩端的軸承支撐。為了連接外部負載,轉子具有延長軸。定子的每個部分都有許多脈沖。相繞組纏繞在這些極上。相鄰的磁極以相反的方向纏繞,使得磁極的徑向磁場的方向相反。如果沿電動機的軸向長度看,每個段的轉子齒是對齊的,但是對應于不同段的定子齒具有相對的相對位置。因此,部分A的定子齒和轉子齒對齊(假設首先為A相供電),部分B和C的定子齒和轉子齒未對齊。當勵磁從A相變為B相時,結果使B區中的定子齒和轉子齒對齊,并使轉子旋轉一級。當消除了B相勵磁而C相勵磁時,電機朝相同方向又邁出了一步。如果重新給步驟A通電,然后再執行另一個步驟,則A部分中的定子齒和轉子齒將再次完全對齊。
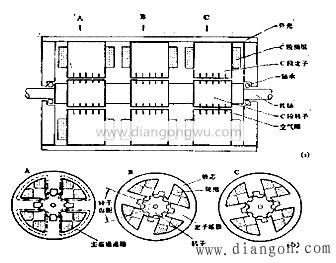
圖1多段磁阻步進電機
勵磁的三個變化使轉子旋轉三步或一個轉子螺距,如果勵磁順序變化,則電動機可以連續旋轉。這是多段式電動機的基本工作原理。
制造商可以方便地增加段數,但是相繞組越多,所需的驅動電路就越多,這相應地增加了驅動電路的成本。另一方面,如果段數超過3,則實際性能不會顯著提高。
上一篇:單相電機電容接線方法,電機電容
新聞資訊NEWS
產品中心PRODUCTS
相關內容