
中間繼電器接線圖(交流伺服電動機的結構和接線圖解)
AC伺服電動機的結構與普通的單相異步電動機的結構相似,并且定子繞組與單相電容性異步電動機的定子繞組相似。在空間中有兩個繞組相隔90o。勵磁繞組.WF,另一個是控制繞組WC,這兩個繞組通常連接到單相電容式異步電動機和兩個不同的交流電源(相同頻率,不同相位)。轉子通常分為兩種結構類型:鼠籠式轉子和杯形轉子。鼠籠式轉子的結構與三相鼠籠式電動機的結構相似,并且在圖中示出了杯形轉子結構。杯形轉子通常由鋁合金或銅合金制成,以形成空心的薄圓柱體,并在空心杯形轉子上放置一個固定的內部定子以減小磁阻。各種構造類型的轉子被制成具有較小慣性的細長形狀。當前,鼠籠式轉子是更常用的。
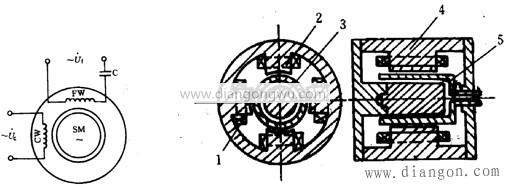
圖1交流伺服電動機的接線圖杯形轉子伺服電動機的結構圖
交流伺服電機基于單相異步電動機原理。勵磁繞組WF連接到交流電網,電壓為 ,控制繞組連接到控制電壓
,控制繞組連接到控制電壓 。當輸入控制信號時,兩相繞組產生旋轉磁場。磁場與轉子中感應的電流相互作用以產生轉矩,從而使旋轉磁場根據旋轉磁場以恒定的滑差速度旋轉。旋轉速度為
。當輸入控制信號時,兩相繞組產生旋轉磁場。磁場與轉子中感應的電流相互作用以產生轉矩,從而使旋轉磁場根據旋轉磁場以恒定的滑差速度旋轉。旋轉速度為 ,其中f是交流電源的頻率,Hz,P。是極對數,
,其中f是交流電源的頻率,Hz,P。是極對數, 是電動機的旋轉磁場速度
是電動機的旋轉磁場速度 ,S是滑差速度
,S是滑差速度 。通過將控制電壓的相位更改為180°,可以更改伺服電機的旋轉方向。
。通過將控制電壓的相位更改為180°,可以更改伺服電機的旋轉方向。 根據伺服系統的工作特性,取消控制電壓后,電動機應立即停止旋轉。然而,眾所周知,當單相異步電動機旋轉時,即使取消了控制電壓,勵磁電壓的單相電源也繼續旋轉。換句話說,存在“旋轉”現象。這意味著失去控制并且不被允許,因此交流伺服電動機必須解決“旋轉”問題。
由于三相異步電動機的特性,可以看出轉子電阻對電動機的機械性能有很大的影響,如圖5-4所示。如果轉子電阻有所增加,如圖中的 所示,則最大轉矩可能出現在=1附近。為此,伺服電動機的轉子電阻
所示,則最大轉矩可能出現在=1附近。為此,伺服電動機的轉子電阻 設計得非常大,因此當電動機失去控制信號單相運行時,正轉矩或負轉矩的最大值出現在
設計得非常大,因此當電動機失去控制信號單相運行時,正轉矩或負轉矩的最大值出現在 處,因此數值為如下:顯示機械特性曲線。
處,因此數值為如下:顯示機械特性曲線。
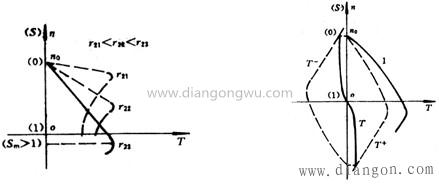 圖2不同轉子電阻和交流伺服電機的機械特性曲線機械特性曲線
圖2不同轉子電阻和交流伺服電機的機械特性曲線機械特性曲線
圖2中的曲線1是帶有控制電壓的伺服電機的機械特性曲線,而去除后的曲線 是。脈動磁場被分解為與正旋轉磁場和負旋轉磁場相對應的兩個轉矩曲線。該曲線是去除控制電壓后的單相電源的復合轉矩曲線。從圖中可以看出,它與第二和第四象限中異步電動機的機械特性曲線不同。當速度n為正時,電磁轉矩T為負,當速度n為負時,T為正。即,在去除控制電壓之后的單相電源供給期間的電磁轉矩的方向總是與轉子相反。旋轉,使制動力矩增大。由于存在制動扭矩,轉子可以迅速停止旋轉,從而避免了“旋轉”現象。電機停止旋轉所需的時間比制動方法(例如同時取消兩相電壓
是。脈動磁場被分解為與正旋轉磁場和負旋轉磁場相對應的兩個轉矩曲線。該曲線是去除控制電壓后的單相電源的復合轉矩曲線。從圖中可以看出,它與第二和第四象限中異步電動機的機械特性曲線不同。當速度n為正時,電磁轉矩T為負,當速度n為負時,T為正。即,在去除控制電壓之后的單相電源供給期間的電磁轉矩的方向總是與轉子相反。旋轉,使制動力矩增大。由于存在制動扭矩,轉子可以迅速停止旋轉,從而避免了“旋轉”現象。電機停止旋轉所需的時間比制動方法(例如同時取消兩相電壓 和僅摩擦)所需的時間短得多。這就是為什么在兩相交流伺服電動機運行時勵磁繞組始終連接到電源的原因。
和僅摩擦)所需的時間短得多。這就是為什么在兩相交流伺服電動機運行時勵磁繞組始終連接到電源的原因。
增加伺服電機 的轉子電阻不僅可以消除“旋轉”現象,而且可以擴大穩定的工作范圍并增加啟動轉矩。目前,我們一般使用高電阻材料制成的鼠籠棒,杯形轉子的壁很薄,通常只有0.2-0.8mm,因此轉子的電阻值比較大,慣性很小。
的轉子電阻不僅可以消除“旋轉”現象,而且可以擴大穩定的工作范圍并增加啟動轉矩。目前,我們一般使用高電阻材料制成的鼠籠棒,杯形轉子的壁很薄,通常只有0.2-0.8mm,因此轉子的電阻值比較大,慣性很小。