
abb機器人急停接線(abb機器人怎么建立外部tcp)
發布日期:2021-03-06 08:00 作品聲明:內容由AI生成
ABB機器人如何設置外部TCP?通常,工具安裝在機械手法蘭上,而工件則安裝在體外。刀具坐標也是相對于tool0導出的坐標,而工件坐標相對于wobj0導出。如果要設置外部TCP,則相反。即,工具必須安裝在機械手的外部,并且工件必須安裝在機械手的法蘭上。
接下來,我將詳細說明設置方法。
首先,創建刀具坐標系,Tooldata_2和工件坐標系Workobject_2。具體方法在此不再贅述。刀具使用4點法,而工件使用3點法。
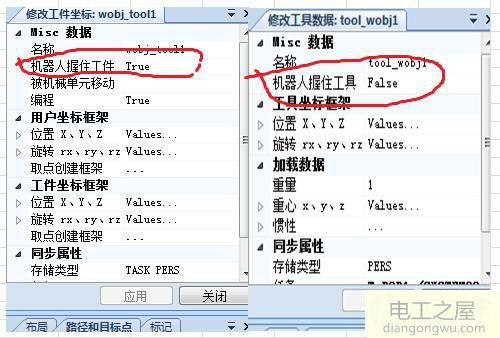
接下來,創建另一個工具坐標系tool_wobj1。 ABB機器人正在創建工具。有選擇。機械手夾持工件。選擇false。我有一個可選的機器人,該機器人創建一個雕刻工作坐標系wobj_tool1并握住一個工具。我們選擇ture。設置如下圖所示。
接下來,將最初創建的刀具坐標分配給工件,并將工件坐標分配給刀具。如下圖所示:
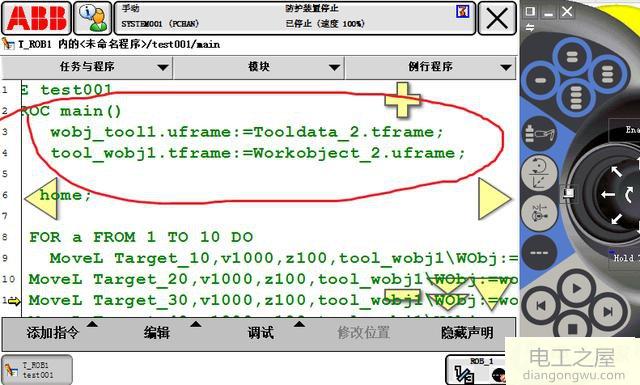
我以這種方式創建了一個外部TCP。
新聞資訊NEWS
產品中心PRODUCTS
相關內容