如何管理自己的電機控制系統設計 選擇“精度”還是“分辨率”?
想象一下你今天早上開車去上班:紅綠燈變綠,你馬上踩油門,車幾秒鐘反應很快,繼續往公司開。這個過程看似簡單,但實際上,車內已經發生了一系列復雜的操作。讓我們一起看看。

當你踩下踏板時,電機會通過轉軸給車輛提供必要的扭矩,然后牽引電機帶動車輛前進。牽引電機(通常是三相同步電機)由復雜的電路控制,包括多個晶體管、電機驅動器、保護和反饋控制。反饋控制信號由電機位置傳感器(見圖1)以模擬角度輸出信號的形式發送(注意,所有真實世界的信號都是模擬的)。連續的模擬信號通過模數轉換器轉換到數字域。理想情況下,你可以把一個連續的模擬信號分解成無限個數字步長,但在現實世界中,ADC的模擬信號量化是有限個步長,產生的誤差稱為量化誤差。這里涉及到“精度”和“分辨率”這兩個術語。
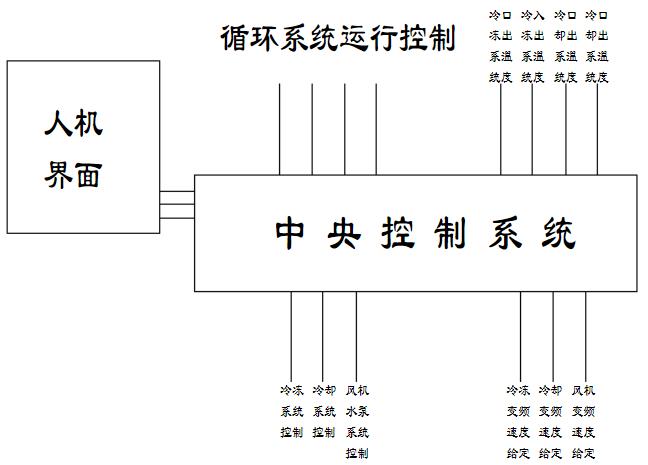
圖1:車輛電機控制系統的典型系統框圖

精密
以一個12位軸角數字轉換器(RDC)為例。當旋轉軸旋轉一次時,轉換器輸出212=4096個數字代碼。在電機控制中,步長通常以弧分或弧秒來定義。一次60分鐘,一次360度。所以一個圈有360次;60=21600弧分。因為有4096個數字碼,每個分區分為=21600/4096,即5.27弧。5.27弧分對應一個最低有效位或一個1LSB。因此,即使輸入角度(連續信號)100%準確,輸出數字碼也不能在下一個碼之前移動超過1LSB(或5.27弧分)。指定該精度值時,RDC將考慮失調、增益和線性誤差。作為參考,無刷旋轉變壓器的典型精度規格為10弧分。整個分析裝置系統的典型誤差,加上傳感器和轉換誤差,大約是15.273弧分(分析傳感器是10弧分,而我的例子是5.273弧分)。這些數字將幫助我們為系統選擇合適的傳感器解決方案。
分解率

那么,分辨率是多少?“12位”分辨率是指360度旋轉時的212種不同輸出代碼。實際分辨率只是RDC輸出端的可用位數;請注意,并非所有位都是無噪聲的。有效分辨率是指考慮信號噪聲的模數轉換中真正的“有用”位。這些是有效數字(ENOB)。ENOB經常與產品數據手冊中描述的分辨率混淆。

1 LSB是什么意思?

到目前為止,我們已經討論了精度和分辨率的定義。現在,讓我們將這些知識應用到一個精度和分辨率通常以LSB為單位的系統中。想知道LSB在系統環境中的含義嗎?先來看看電機控制領域1 LSB相對弧分和弧度的換算值。以12位和10位為例:
在12位中,1個LSB等于:
1LSB=360 212=0.087度=5.27弧分=2.64弧分=0.04395度
同樣,在10位中,1 LSB等于:
1LSB=360 210=0.351度=21.09弧分=10.54弧分=0.1757度
結論
了解汽車運營背后的深層原理不是很有意思嗎?精度和分辨率是根據您的規格選擇合適的傳感解決方案的基礎。當精度優于分辨率時,轉換器的傳遞函數可以通過分辨率位數來精確控制。
請在下面發表評論或訪問德州儀器在線社區汽車論壇,與大家討論旋轉位置感應。
其他信息
閱讀模擬應用期刊文章《電動汽車軸角數字轉換器設計注意事項》。
要了解更多有關工業應用中旋變檢測的信息,請閱讀白皮書《工業旋變檢測應用的電氣設計考慮》。
在這篇EDN文章系列的第一部分和第二部分中,了解更多關于電動汽車設計的信息。
借助TI設計-汽車用旋變數字轉換器參考設計(TIDA-00796),基于旋變的旋轉位置檢測設計得以快速啟動。
下載這些應用指南:
“PGA411-Q1印刷電路板設計指南”。
PGA411-Q1故障排除指南。
“PGA411-Q1軟件開發人員指南”。
“PGA411-Q1使用任何主系統逐步初始化”。